Crazyflie 2.0架构包含两个微控制器:
A NRF51, Cortex-M0, 用于实现无线通信和电源管理:
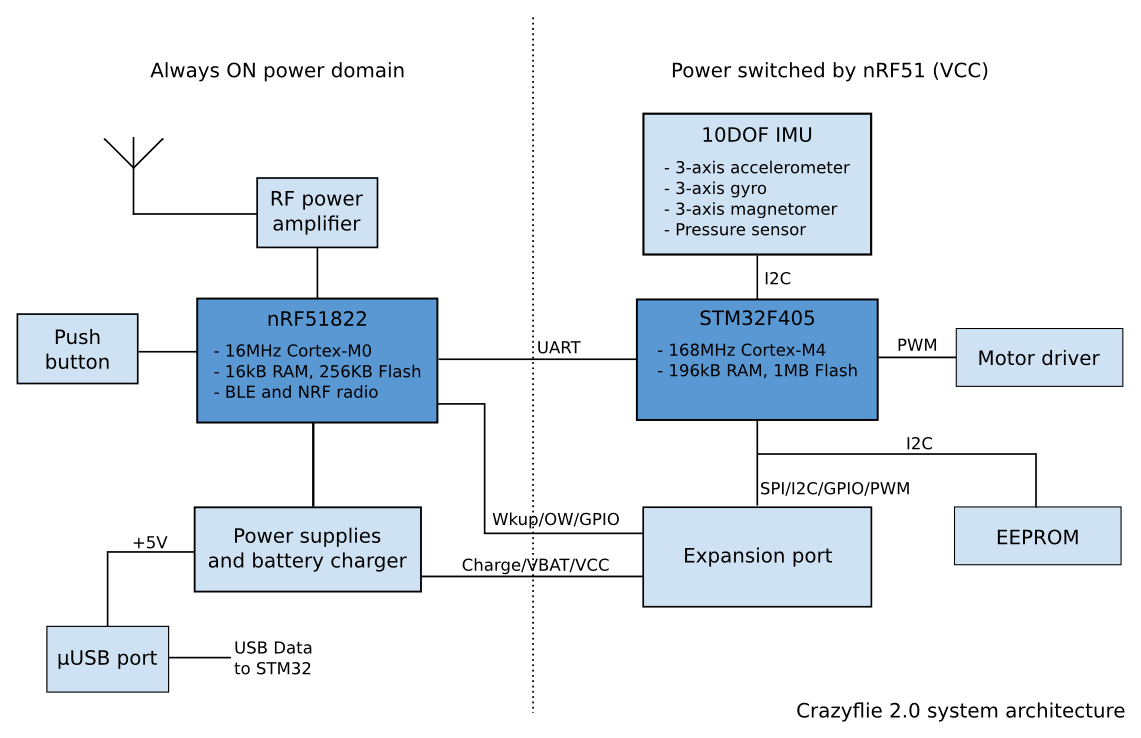
(1)按键开关逻辑(ON/OFF logic)(2)控制给其它系统供电(STM32, sensors and expansion board)(3)电池充电管理和电压測量(4)Master 无线bootloader(5)无线和BLE通信(6)探測和检測外部扩展板 An STM32F405, Cortex-M4@160MHz, 用于实现飞行控制以及其它的重负载的工作:(1)读取传感器和电机控制(Sensor reading and motor control)(2)飞行控制(Flight control)(3)測量(包含电池电压)(4)用户扩展功能以下是总体硬件连接的框图:
The nRF51822
主要有两个任务:处理无线通信的数据和电源管理 ,它扮演无线桥的作用,将无线接收的数据发送给STM32F405RG。
Crazyflie 2.0 用到了CRTP和BLE的无线通信, 同事硬件也支持其它的协议,比方ANT。CRTP模式兼容 Crazyradio USB dongle ,提供2Mbit/秒的低延迟数据通信. 測试显示,在没有重传和包大小1~32字节的情况下,普通无线通信2Mbps 的延迟在360us 和1.26ms之间. BLE最小的延时是7.5ms,可是眼下实际延时大于20ms. CRTP link基本的优势在于在不论什么支持USB的主机系统上都能够很easy的实现,这也是为什么它成为Crazyflie首选来做试验. BLE 主要是用于手机控制Crazyflie 2.0.
nRF51 另外一个优势是能够用纽扣电池供电, 也就是说很适合用在低功耗的领域,所以NRF51会负责功耗管理部分。当USB或者电池供电的时候,NRF51总是会有电,其余部分电路的供电和行为动作取决于按键按下的时间长短(比如,能够用于启动到bootloader).眼下也实现了通过外部扩展板的一个引脚唤醒Crazyflie 2.0
The STM32F405
STM32是基本的控制MCU。尽管它是由NRF51供电启动。相对于NRF51它是作为主要角色。它实现了两个功能:飞行控制和全部的通信算法。扩展板主要是跟STM32连接,所以扩展板的驱动主要实如今STM32这边。
STM32F405 内部 RAM 196kB。这么大的RAM一般的应用肯定是没有问题的。实现飞行控制搓搓有余,还能够实现一些复杂的密集型的算法。比如:惯性传感器和GPS数据的融合。
Inter-MCU communication
两个MCU之间的通信靠 , 该协议是Crazyflie定义的基于包的简单的可扩展的协议机制。
Syslink 提供了全部的两个MCU之间全部的消息, STM32是主机,NRF51是从机.我们尽可能保持NRF51是简单的,而负责的算法都会再STM32实现。
syslink消息样例:
(1)原始的无线包,发送和接收
(2)电源管理測量